Europameister in der Klasse „Small Robots“

Unser Wahlkurs CJT-Robotics war auch in diesem Jahr beim RoboCup sehr erfolgreich: Fünfter in der Gesamtwertung der inoffiziellen Europameisterschaft, zweiter in der Klasse Mobilität, so wie letztes Jahr, und in der Klasse der „Small Robots“ erreichten wir sogar den ersten Platz! Vor der Universität Schanghai und als erste und einzige Schülermannschaft unter lauter Hochschulen und Profis seit Beginn des Wettbewerbs 2001 in der Major-League der Rettungsroboter.
Heuer wurden wir von Anfang an ernst genommen, aber Exoten waren wir doch: Allein wegen der außergewöhnlichen Anfahrt mit dem Zug, wenn wir mit Sack und Pack, das heißt außer mit Rucksäcken und Roboter auch mit unserer ganzen Laborausrüstung umstiegen.

Unser Wahlkurs mit Teilnehmern aus der achten bis zehnten Klasse
Gegenüber 2018 konnten wir dank hilfreicher Sponsoren mit kräftigeren Motoren und einer überarbeiteten Radaufhängung starten, die wir nach den Erfahrungen der ersten Tage mit Alustegen noch weiter verstärkten; das Team der TH Nürnberg fertigte uns zwei Nächte lang Teile mit dem 3D-Drucker. Überhaupt war die Zusammenarbeit mit den eigentlich konkurrierenden Mannschaften hervorragend: Wir halfen uns wechselseitig mit speziellem Werkzeug, nötigen Bauteilen und zielführenden Ideen aus, um die Roboter während des Wettbewerbs noch weiter zu verbessern.
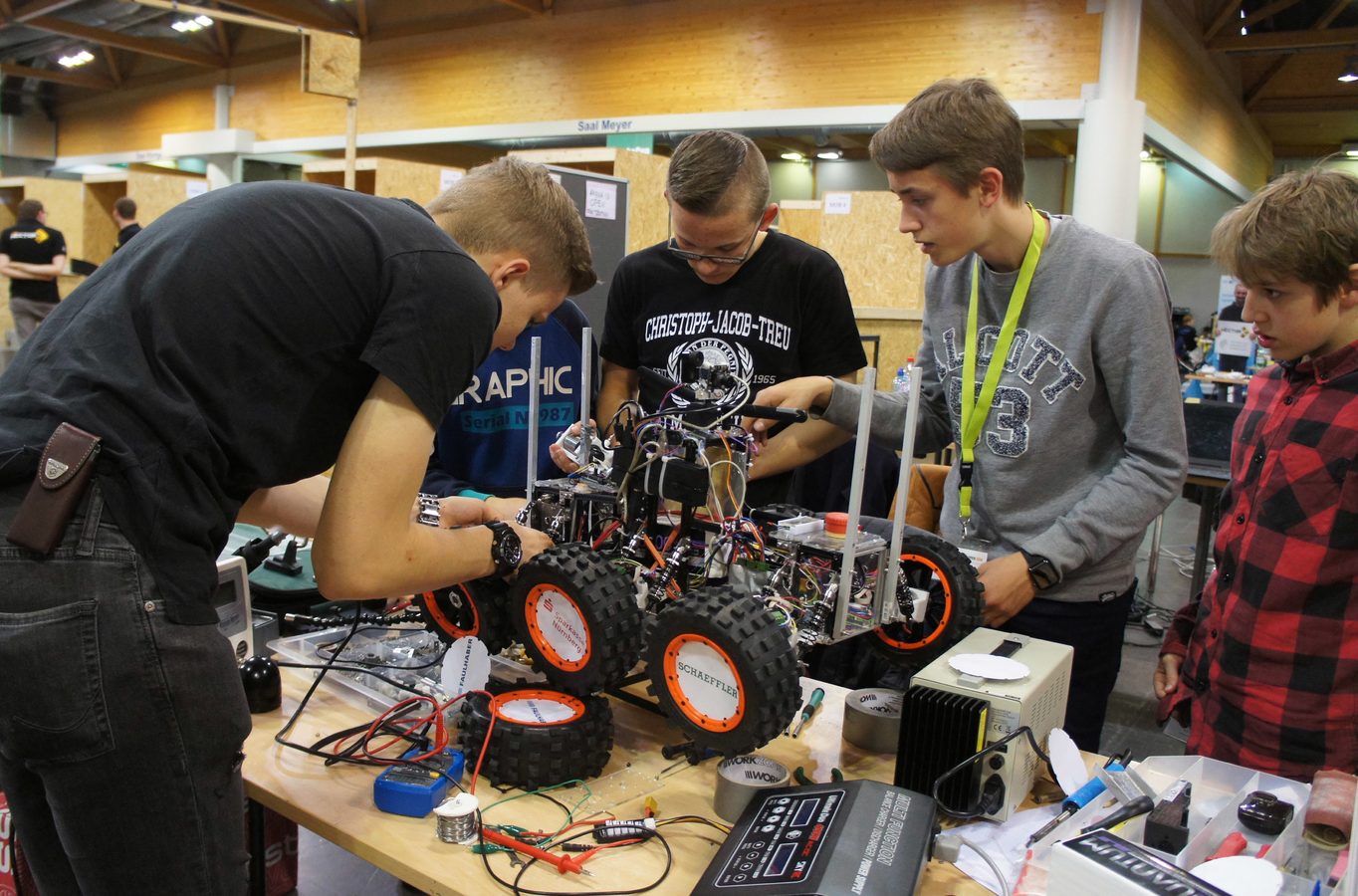
Wie bei allen Teams gibt es vor den Läufen viel Arbeit am Bautisch.
Die Software passten wir bis unmittelbar vor unserem ersten Lauf noch mit Erfolg an die Erfordernisse des Wettbewerbs an, denn die Wettbewerbsleitung wünschte sich, dass alle Anzeigen gemeinsam in der graphischen Benutzeroberfläche dargestellt werden.

Vier Jungs aus der Softwaregruppe beim Programmieren und Problemeknacken
Jedes große Team, und das waren wir zweifellos, hatte einen Juror zu entsenden. Wir bestimmten Manuel Riel dazu, einen Mathematik- und Informatikstudenten, der wieder als Betreuer mitfuhr und der vor zwölf Jahren selbst mit einem Roboter für unsere Schule an einem Schülerwettbewerb teilgenommen hat.
In den zwölf Qualifikationsläufen am Freitag und Samstag mussten wir möglichst viele Punkte holen: Gewertet wurde jeweils das Produkt aus der Anzahl der Sensoren und der Fahrten innerhalb von 20 Minuten durch die Teststrecke. In puncto Geschicklichkeit und Geländegängigkeit waren wir ohnehin ziemlich gut: Den Parcours „Hurdles“, bei dem sämtliche Stufen aus sich stets wegdrehenden Rollen bestehen, schafften wir auf Anhieb und mit hoher Geschwindigkeit.
Weil wir unsere Programme noch während der Wettbewerbstage entscheidend weiterentwickeln konnten, hatten wir aus der vorgegebenen Liste schließlich genau unsere sechs Wunschsensoren einsatzbereit: Die optische und die Infrarotkamera, CO2-Detektion, Sprechfunk, Muster- und Bewegungserkennung – auch mittels eines im Gegensatz zu letztem Jahr potenteren Computers an Bord.
Beim Sensortest: Messen des Kohlenstoffdioxids in der Atemluft
Immer wieder mussten wir uns kreative technische Lösungen einfallen lassen. Etwa diese: Wie erreichen wir es, dass das 12 V-Relais für den Not-Aus-Knopf schon vor dem Anschließen der 24 V-Batterie anzieht? Indem wir das Fahrzeug anschieben und die Elektromotoren als Generatoren verwenden, quasi wie ein Kickstart.
Oder: Wie erweitern wir die Rechenleistung unseres Steuerlaptops, damit unser Roboter automatisch und in Echtzeit die Gefahrensymbole im Parcours erkennt? Indem er die Bilder an zwei weitere Computer funkt, die – zeitweise gekühlt durch Eisbeutel aus der nahen Tankstelle – die Bildverarbeitung durchführen und die Auswertung zurücksenden.

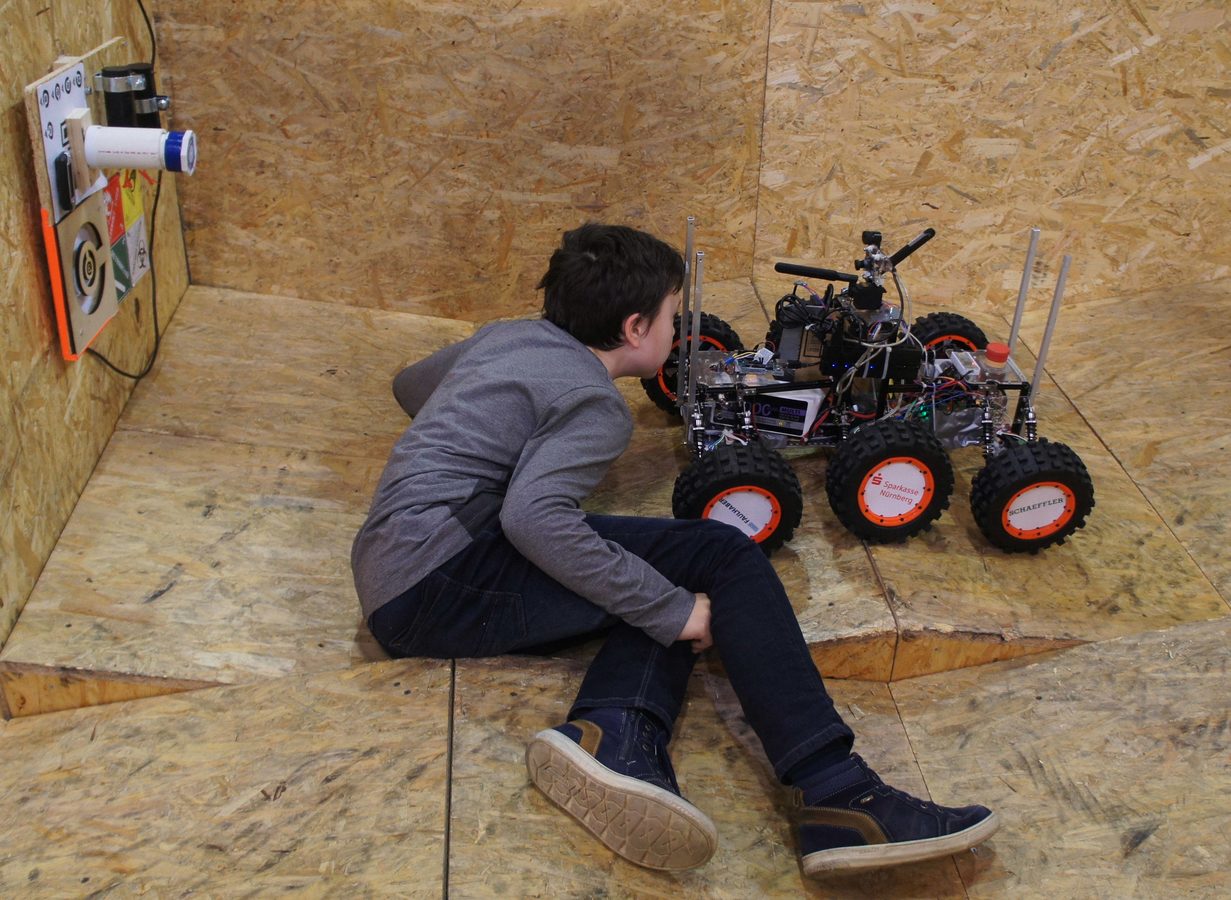
Den Roboter selbst (rechts hinten) können die Operateure nicht sehen.
Die Anspannung, der dauernde Einsatz, das Mitfiebern, der Zeitdruck und die langen Tage zehrten manchmal an den Nerven. Dass die vegetarische Verpflegung in unserer Gruppe nur für diejenigen auf Wunsch durch Fleisch ergänzt wurde, die auf YouTube einen Blick in den legendären Film „Dominion“ warfen, kam bei einigen gut, bei anderen weniger gut an.
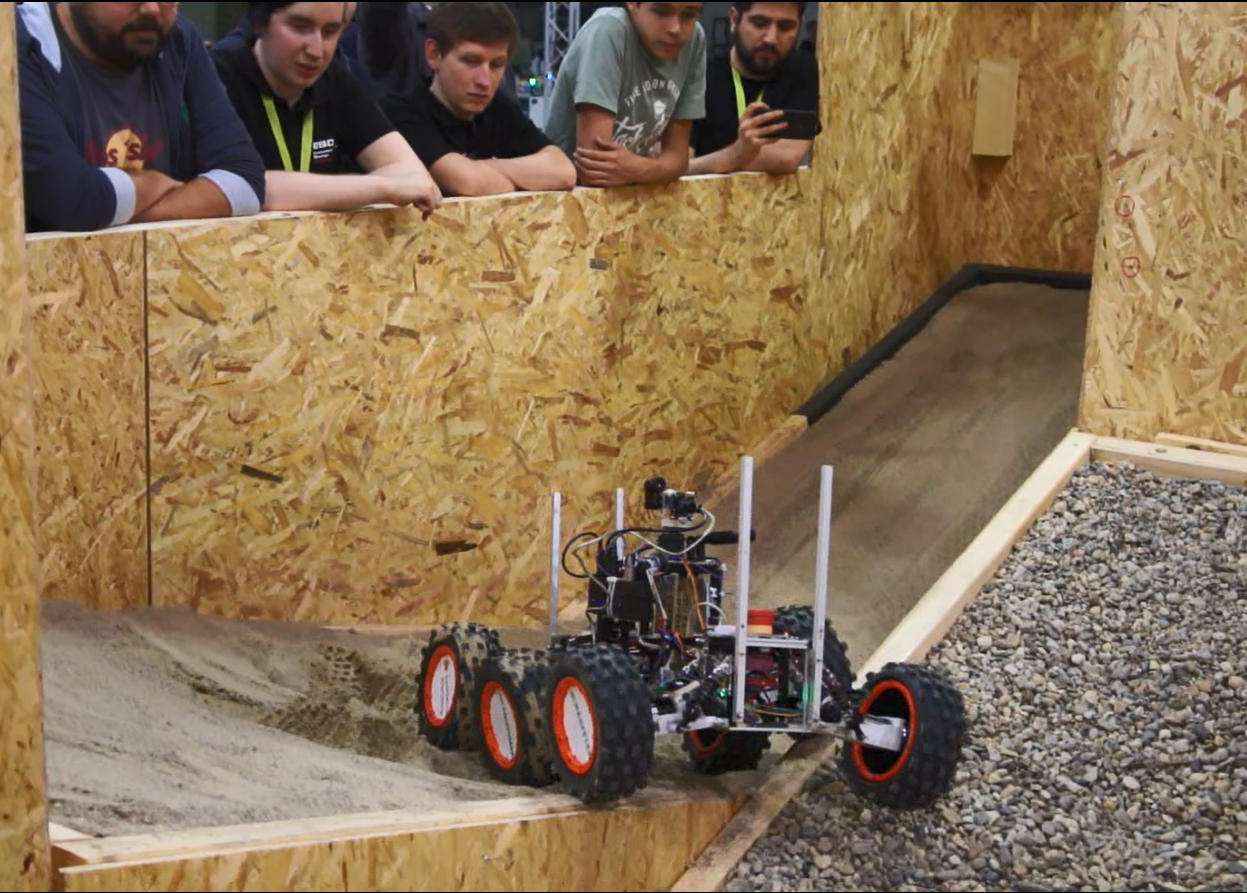
Alle anderen Ketten- oder Radroboter ließen wir im Sand- und Kiesparcours weit hinter uns.
Die besten Teams wurden für das Finale am Sonntag nominiert – wir waren da natürlich mit dabei und mussten in der vorgegebenen Zeit so viele Testaufgaben in so vielen Parcours wie möglich lösen. Wie immer saß der Operateur in einer Kabine und steuerte den Roboter nur über sein Kamerabild. Würde das Gerät autonom fahren, so zählten die Runden doppelt. Das konnten aber nur wenige Rivalen, und die nicht allzu schnell. Ob wir unseren Roboter wohl bis nächstes Jahr so weit bringen, dass er dies bei einigen Läufen auch schafft?
Das hängt nicht zuletzt von der noch offenen Finanzierung ab. Für heuer danken wir vor allem der Sparkasse Nürnberg, die das Projekt angeschoben hat, dem Bildungsfonds des Landkreises Nürnberger Land, der es kofinanziert, den Firmen Faulhaber und Schäffler für Motoren, Fräs- und 3D-Druckarbeiten, dem FabLab Nürnberger Land und besonders Herrn Prof. May, dessen Förderung wir unseren Erfolg vor allem verdanken.

Rudolf Pausenberger