Zweiter Deutscher Meister bei den German Open
Kassel, 17. bis 20.4.2024
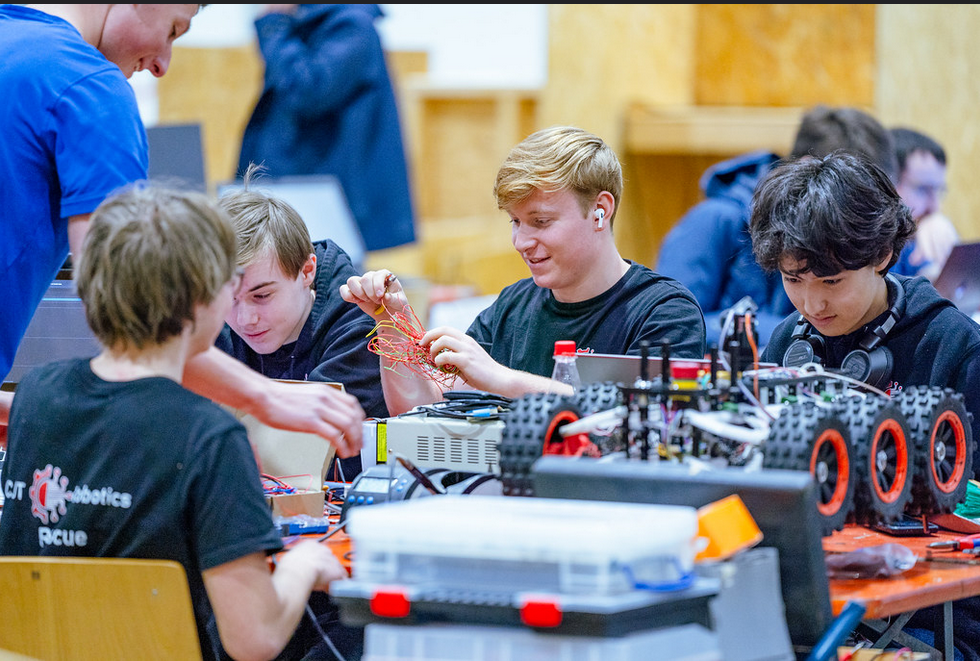
Seit Wochen arbeiten alle fokussiert.
Die Major-League des RoboCups ist eigentlich kein Schülerwettbewerb, sondern es sind die German Open für Unis und Ingenieure. Das CJT hat sich, als einzige Schule jemals, trotzdem dafür qualifiziert und unsere Ergebnisse werden von Jahr zu Jahr besser. In zehn Parcours müssen sich die Roboter bei verschiedenen Aufgaben zur Geländegängigkeit, Geschicklichkeit und Bilderkennung teleoperiert bewähren. Wir, das sind Noah Heckel, Markus Peltsarszky, Max Müller, Linus Gürne, Tim Hennig und Philipp Fischer, haben mit großem Engagement darauf hin gearbeitet, entscheidend geschult und gefördert von Herrn Prof. May von der TH Nürnberg.
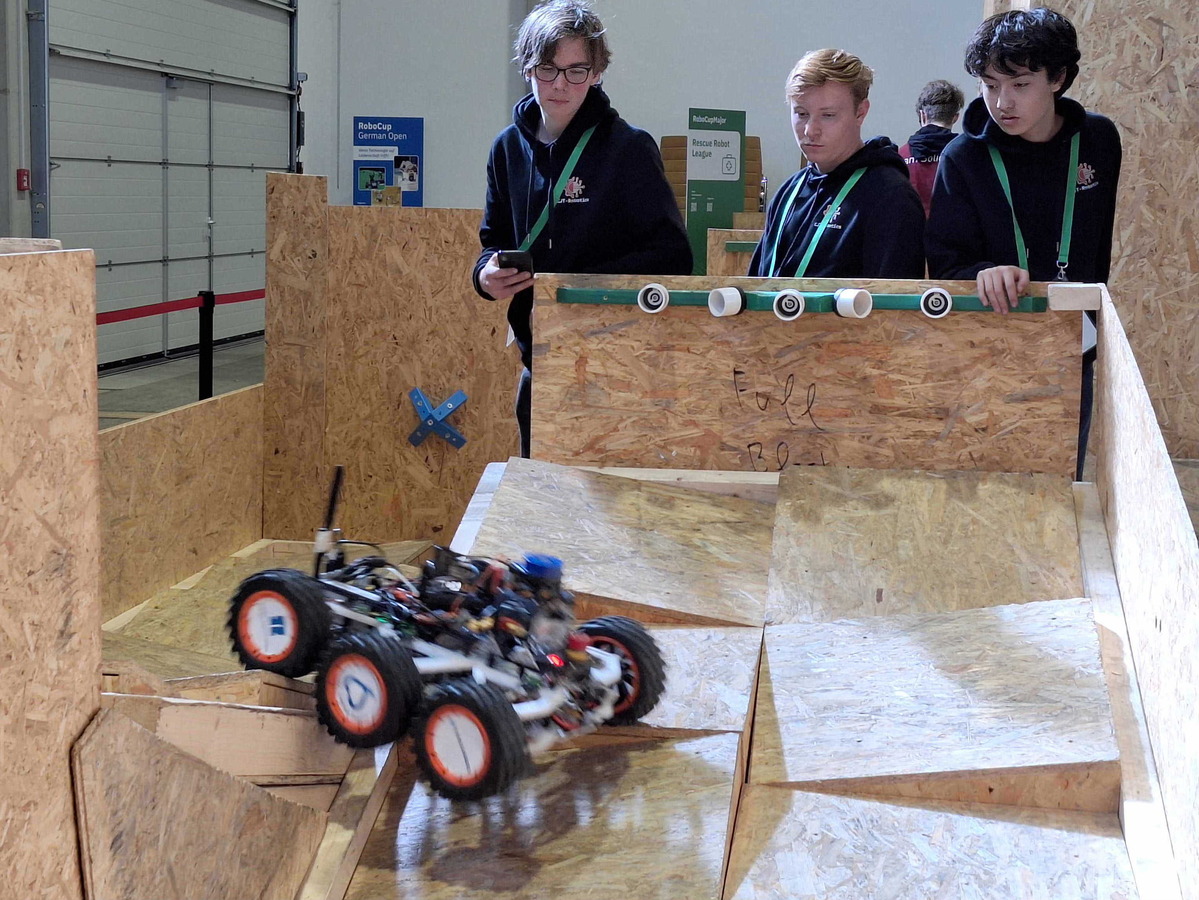
Unsere Domäne: In schwierigem Gelände sind wir schnell.
Dass wir die Geländegängigsten sind, wissen wir aus den Vorjahren, und so haben wir unseren Sieg in der Kategorie „Mobilität“ bereits erwartet. Weil unsere wirklich wertvolle Komponente die leistungsfähigen, von Faulhaber gesponsorten Motoren sind, überwindet unser relativ leichter Roboter mit seinem niedrigen Schwerpunkt die Hindernisse ziemlich zügig; das hat uns immer ein komfortables Punktepolster gesichert (Filme siehe ganz unten*).
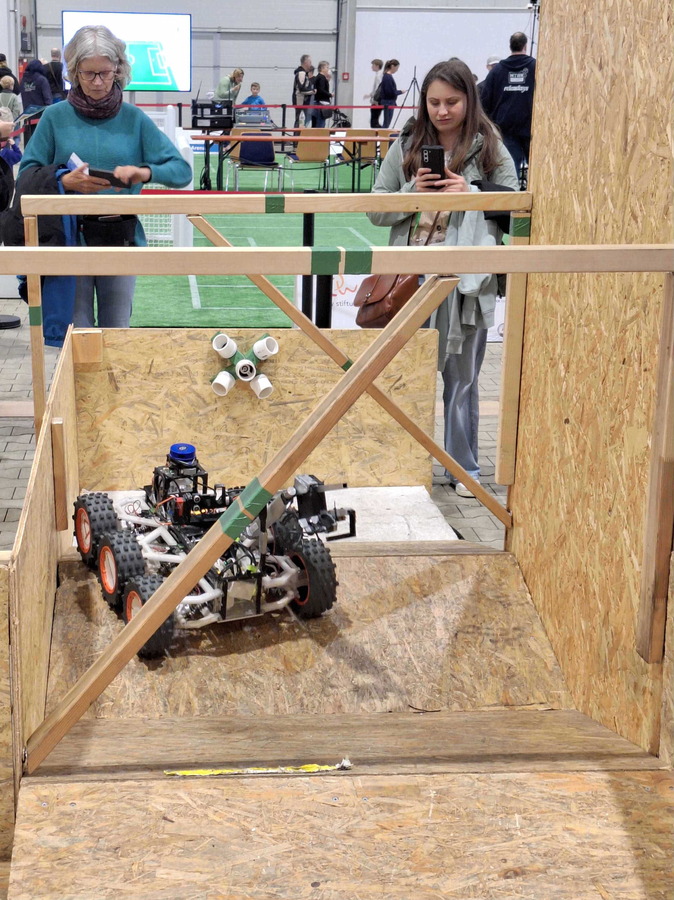
Weil wir die magnetisch aufgehängten Balken nicht reißen, gibt es Extrapunkte.
Dagegen ist die Kategorie „Geschicklichkeit“ für uns härter, insbesondere, weil wir unser Gerät zwar ziemlich gut auf die letztjährigen Anforderungen optimiert hatten, wir aber bei der Ankunft in Kassel mit Schrecken erfahren, dass das Reglement in entscheidenden Details verändert wurde. Jetzt ist Improvisieren gefragt: Ein ausgeklügelter Roboterarm ist auf die Schnelle nicht drin, daher gilt es, verfügbares Material zusammenzuschustern. Klar gibt es Stahlstangen im Baumarkt und nach einer halben Nacht lässt sich das Ergebnis sehen, aber die exakten Anforderungen unter Zeitdruck am nächsten Tag erzwingen doch wieder eine Konstruktion mit Kabelbindern und Heißkleber, die sich dann mitten im Prüfungslauf verabschiedet. Eine Sofortreparatur zieht zwei Minuten Zeitstrafe nach sich. In der Hektik kleben wir die Kamera falsch herum …. Was will ich damit sagen? Wenig schlafen in der Nacht, Nerven aufreiben am Tag und alles durchwirkt mit sagenhafter Begeisterung.

Die Kamera inspiziert das Testbild im Rohr bereits mit dem neuen Arm.
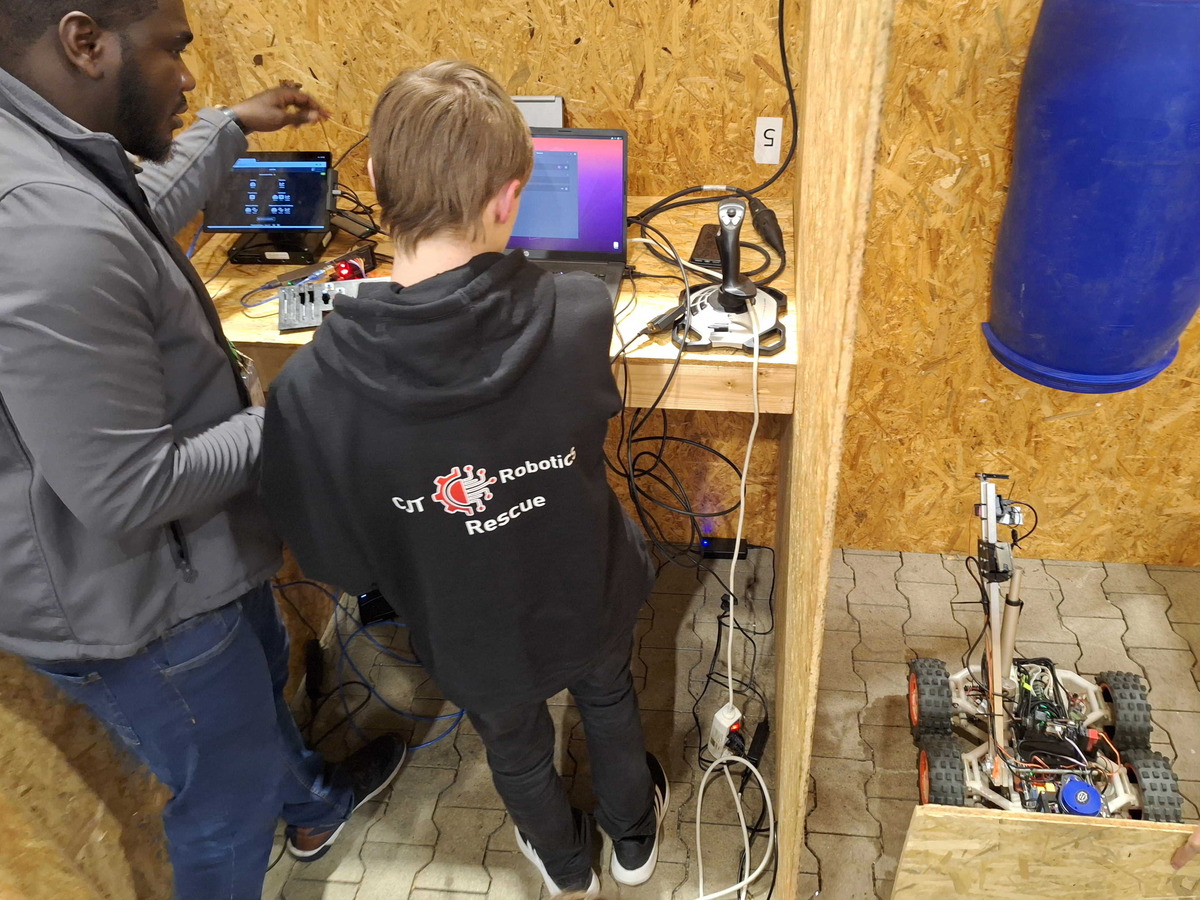
Auch in der dritten Kategorie, der Bilderkennung, können wir nicht mit teuren Computern auffahren wie andere Gruppen: Der beste, auf den wir zugreifen können, ist Markus‘ privater Rechner, er steht in Lauf. Aber der Reihe nach: Am zweiten Abend veröffentlicht die Jury Fotos, die am nächsten Tag automatisch erkannt und zugeordnet werden müssen. Verschiedene Feuerlöscher, Ventile, Griffe usw. Bevor wir um 22:30 Uhr aus der Halle geworfen werden, fotografieren wir sie aus allen Richtungen und mit verschiedener Beleuchtung. Zuhause im Appartement lesen wir hunderte Fotos ein und bereiten sie auf. Um 2:30 Uhr schickt Markus sie nach Lauf, ruft seine Mutter an und erklärt ihr, wie sie das KI-Trainingsprogramm starten soll. Gut vier Stunden später sitzen wir wieder beim Frühstück, nicht alle Augen sind schon ganz offen. Aber zum Prüfungslauf gegen 10 Uhr ist die KI fertig und unser Roboter glücklich in der Lage, alle Bilder zu erkennen.

Markus zeigt dem Juror, in welche Richtung der Landoltring auf dem Kamerabild geöffnet ist.
Eine weitere Aufgabe zur Bilderkennung: Sensoren müssen nach jedem Parcours autonom Ausschnitte verschiedener Gefahrensymbolen erkennen und zuordnen, Bewegung automatisch detektieren, einen im Infraroten strahlenden Gegenstand sehen und einiges mehr. Wir fühlen uns gut vorbereitet, wir hatten an der Schule ja das Testbrett von 2023 nachgebaut. Aber jetzt ist alles im Eimer, genauer gesagt auf dem Boden eines solchen und unser Roboter muss über den Rand des Eimers hineingucken. Unmöglich bei unserer flachen Konstruktion mit nach vorne gerichteten Kameras. Wir müssen weiter umbauen – nicht nur bei uns, sondern auch bei den anderen Gruppen die Hauptbeschäftigung des Tages.

Baguettes auf dem Heizbett des 3D-Druckers
Und in der Nacht? Fokussiert und kompetent arbeiten alle in der Unterkunft weiter. Naja, alle bis auf einen, der, weit abgehängt, froh ist, dass er das Team mit Kochen und Abspülen einigermaßen unterstützen kann. Und natürlich bei dem Formalkram, für den ein Erwachsener nötig ist bzw. ein betreuender Lehrer :-)
Der Operateur schaltet gerade ein Kästchen dazwischen, das unsere Funkverbindung verschlechtert, um es schwerer zu machen.
Die anderen Gruppen kommen aus Österreich, der Schweiz, Frankreich, Polen u.a., damit sind die German Open eigentlich eine Europameisterschaft. Aber auch sie kochen nur mit Wasser. So überlegen beispielsweise manche Roboterarme sind, die Komplexität hat ihren Preis: Sie sind meist langsam. Damit können wir einiges wettmachen und bald kristallisiert sich eine Spitzengruppe aus drei Teams heraus, die das restliche Feld hinter sich lassen. Bald tragen wir den Sieg bei der Mobilität und auch bei den Small Robots davon, das sind Roboter, die ein gleichseitiges Dreieck von 60 cm Kantenlänge durchfahren können. Einen Vorteil muss es ja haben, dass wir nicht über so viele leistungsstarke Komponenten verfügen wie die anderen, die nicht unsere 15 kg wiegen, sondern 80 kg und mehr. Doch der unglaublichste Erfolg ist, wir schaffen wir es ins Finale und schließlich auf den zweiten Platz der Gesamtwertung! Nur dem Team aus Darmstadt müssen wir uns neidlos geschlagen geben, es besteht aus 15 Studenten, 7 Doktoranden, sie haben als Weltmeister jahrelange Wettkampferfahrung und ein Budget von einer halben Million.

Es gibt immer etwas zu improvisieren.
Spannend wird die Weltmeisterschaft im Juli in Eindhoven. Weil sie in Europa stattfindet, stellen wir uns der Konkurrenz, deren Roboter allerdings teilweise autonom agieren und ausgereifte Arme haben: Die Herausforderung ist enorm, die Vorfreude riesig und Dabeisein alles.
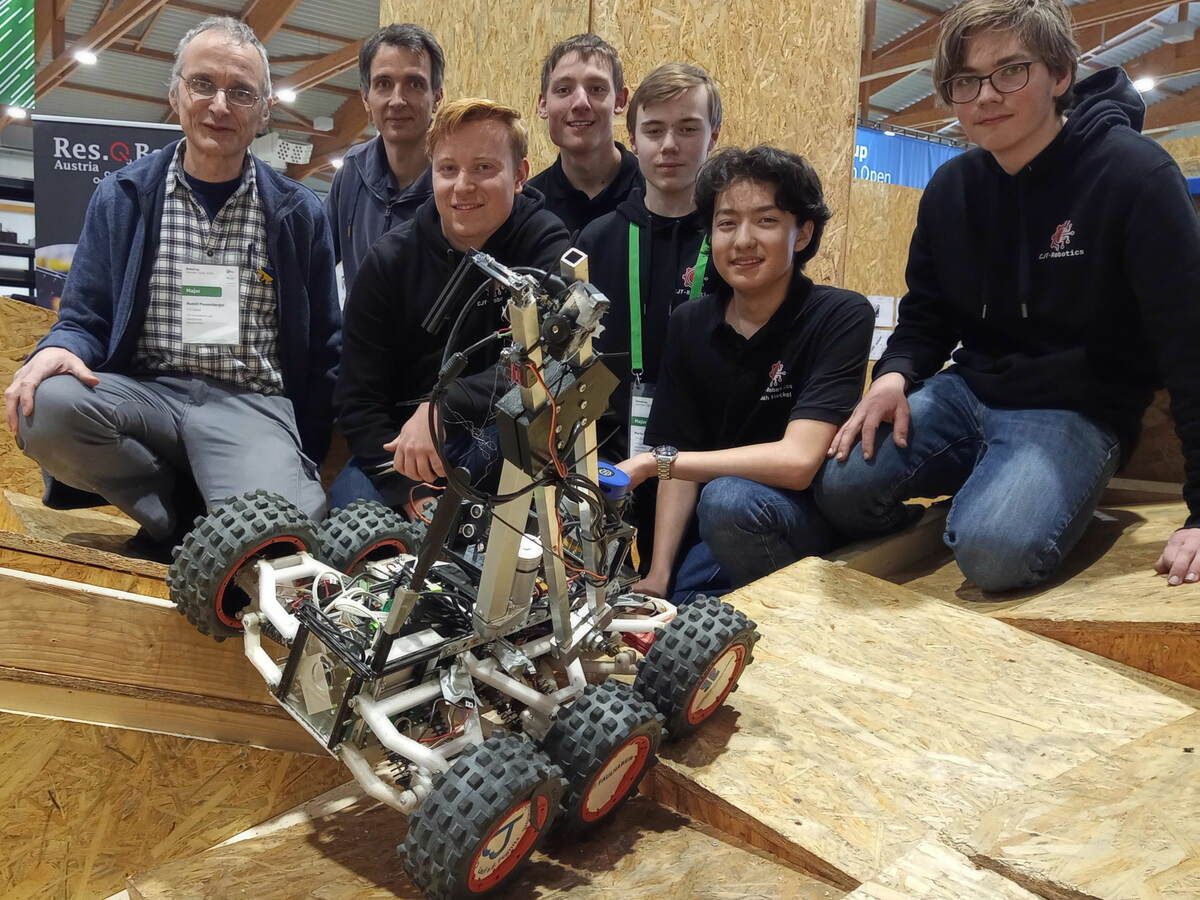
Im Hintergrund Herr Prof. May, unser Mentor
PS.: Eine Schülermutter hat mir glücklich angeboten, dass ich einen Wunsch bei ihr frei habe. Da habe ich sie gebeten, ob wir den Transporter unseres frisch gegründeten Vereins für Nothilfe und Völkerverständigung im nächsten Winter in ihre Scheune stellen dürfen. Mal sehen, ob sie das ermöglichen kann. Aber das ist eine andere Geschichte.

Auch mit fünf Rädern sind wir noch geländegängig genug.
Vielen Dank an die Hauptsponsoren dieses Jahres:
- Die Firma Faulhaber, die uns die besten auf dem Markt erhältlichen Motoren zur Verfügung stellt,
- Siemens für entscheidende Hardwarekomponenten, etwa den Computer, der auf dem Roboter mitfährt,
und finanzielle Hilfe, die uns die Teilnahme am Wettbewerb in Kassel ermöglicht hat, sowie
- EduArt, die uns in vielfältiger Weise zum Beispiel mit elektronischen Sonderanfertigungen unterstützen.


*Zwei Filme zum Vergleich der Fähigkeiten bei der Mobilität im schwierigsten Parcous „Sand und Kies“. Ihn haben überhaupt nur zwei Teams geschafft, siehe hier und hier:


Zweiter Platz in der Gesamtwertung
Zeitung
Zeitungsartikel: Halluzinieren geht auch ohne KI
Laufer Schüler waren zwar nicht auf der Weltmeisterschaft, das kam erst ein paar Monate später,sondern wurden Zweiter Deutscher Meister in Kassel, und wir hatten selbstverständlich einen (nicht nur einen!) Computer beim Wettbewerb dabei, wie schon das Foto dokumentiert, aber es ist schön, dass es überhaupt ein Artikel in die Zeitung geschafft hat. Und so viel anders ist seine Qualität gegenüber sonstigen Beiträgen zu Naturwissenschaft und Technik ja auch nicht. Mein Tipp: Nach dem Schreiben stets jemanden drüberschauen lassen, der eine Ahnung vom Sachverhalt hat.


CJT-Logo – Roboter mit Kameraausleger – unser Herz